
Yiyuan Pan
M.S. in Robotics
Carnegie Mellon University
I am a first-year MSR student at Carnegie Mellon University, advised by Prof. Changliu Liu. Previously, I received my B.E. degree in Automation at Shanghai Jiao Tong University, advised by Prof. Zhe Liu and Prof. Hesheng Wang.
Research Vision: My research focuses on Constraint-Grounded Learning for neuro-symbolic planning, aiming to build a bridge between unstructured perception and verifiable decision-making. My work is structured around two key areas: Constraint Acquisition, the learning of formal, explainable rules from sensory data, and Constraint Realization, the synthesis of these rules into robust and verifiable policies.
Research Interests: Multimodal Learning, Neuro-Symbolic Learning.
Education
Carnegie Mellon University
M.S. in Robotics
Advisor: Prof. Changliu Liu
Shanghai Jiao Tong University
B.S. in Automation
Experience
Research Intern — California Institute of Technology
Advisor: Steven Low
Focused on integrating convex optimization principles with neural network learning to build task-driven decision-making systems.
Research Intern — ByteDance Seed
Advisor: Yuan Lin, Hang Li
Focused on building a multimodal long-horizon memory system that enables models to reason over arbitrarily long, streaming inputs.
Selected Publications
Representative works are highlighted. For a complete list, please see Google Scholar.
In Submission 2026
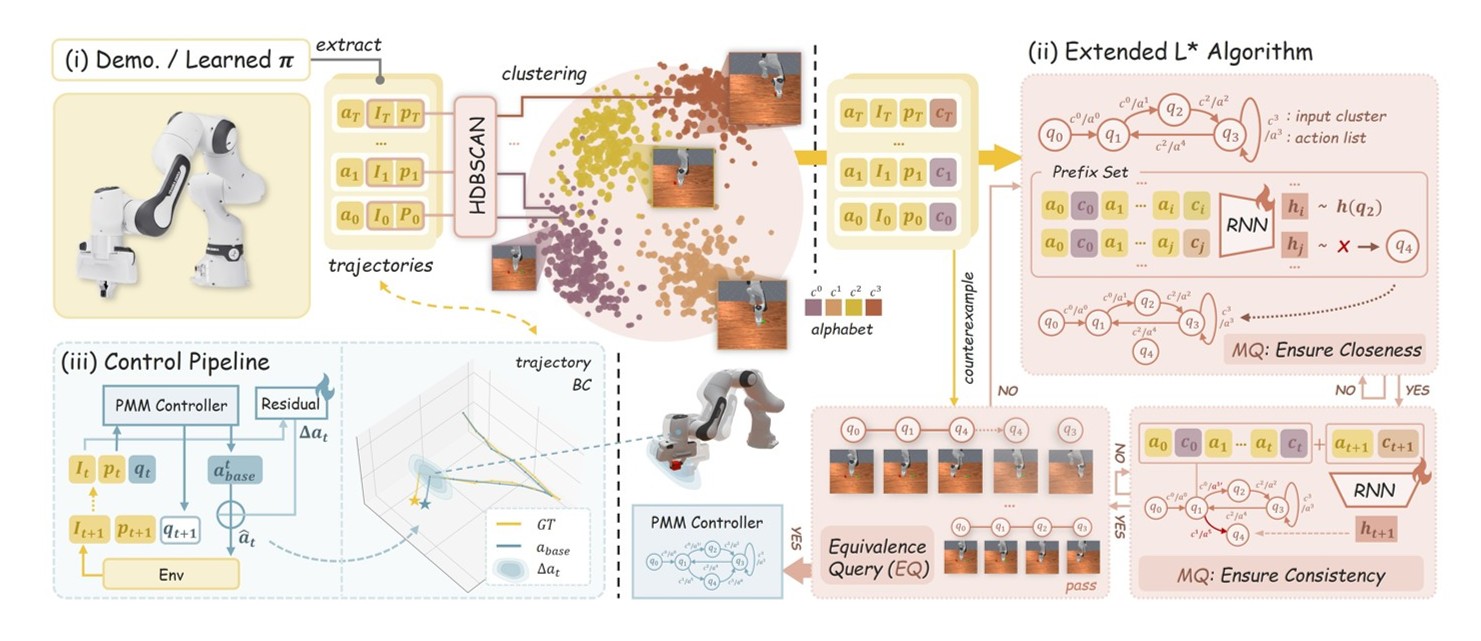
Emergent Neural Automaton Policies: Learning Symbolic Structure from Visuomotor Trajectories
Yiyuan Pan*, Xusheng Luo*, Hanjiang Hu, Peiqi Yu, Changliu Liu
Introduce an emergent neuro-symbolic policy framework that infers an interpretable Mealy state machine from demonstrations and uses it to guide residual behavior cloning for precise continuous control.

NeurIPS 2025
Seeing through Uncertainty: Robust Task-Oriented Optimization in Visual Navigation
Yiyuan Pan, Yunzhe Xu, Zhe Liu, Hesheng Wang
Develop a conformal uncertainty–aware, task-oriented optimization framework that stabilizes visual navigation by aligning perception reliability with downstream decision quality.

NeurIPS 2025
Wonder Wins Ways: Curiosity-Driven Exploration through Multi-Agent Contextual Calibration
Yiyuan Pan, Zhe Liu, Hesheng Wang
Introduce a chance-constrained, context-calibrated curiosity framework that drives stable and efficient multi-agent exploration under uncertainty and partial observability.

AAAI 2025
🏆 Oral Presentation
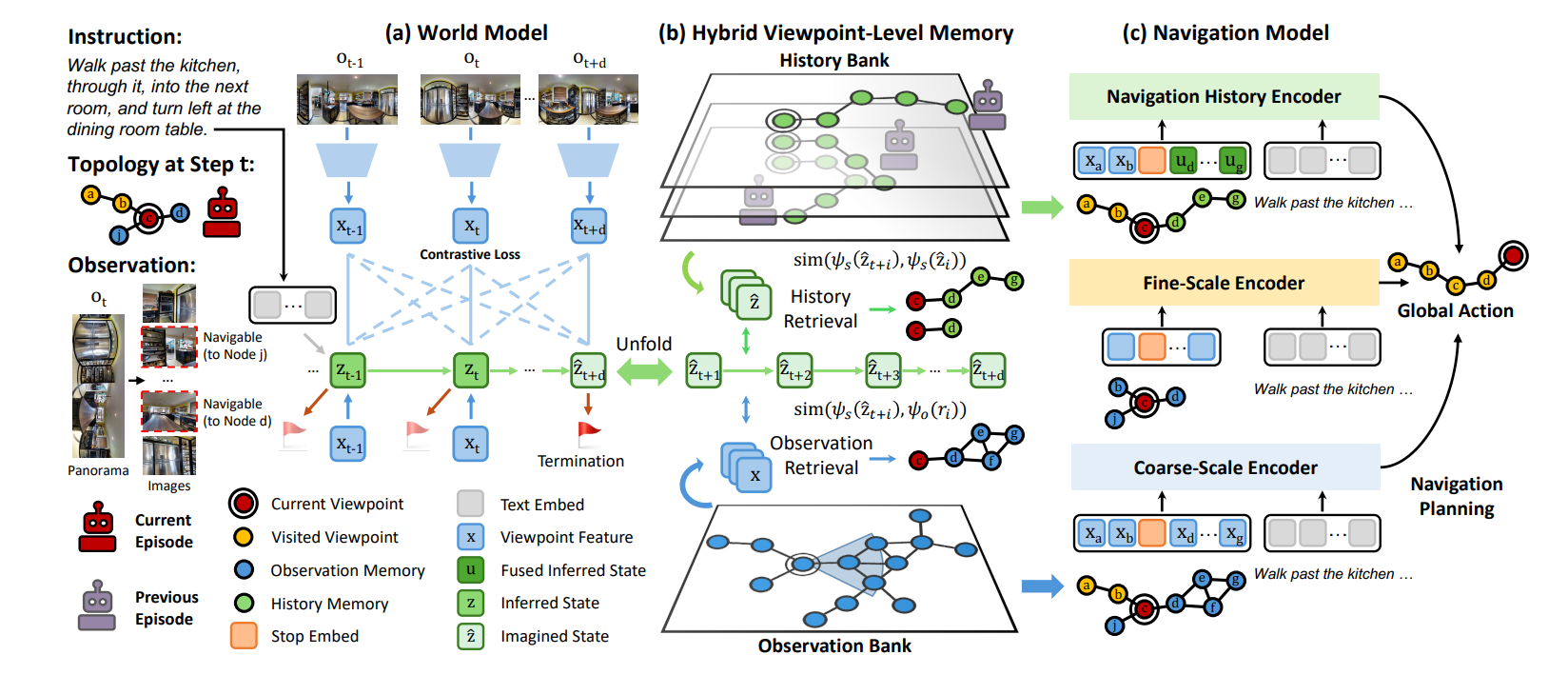
Planning from Imagination: Episodic Simulation and Episodic Memory for Vision-and-Language Navigation
Yiyuan Pan, Yunzhe Xu, Zhe Liu, Hesheng Wang
Introduce an imagination-driven framework for navigation agents to reason beyond immediate perception, achieving human-like anticipatory generalization.
AAAI 2025
🏆 Oral Presentation
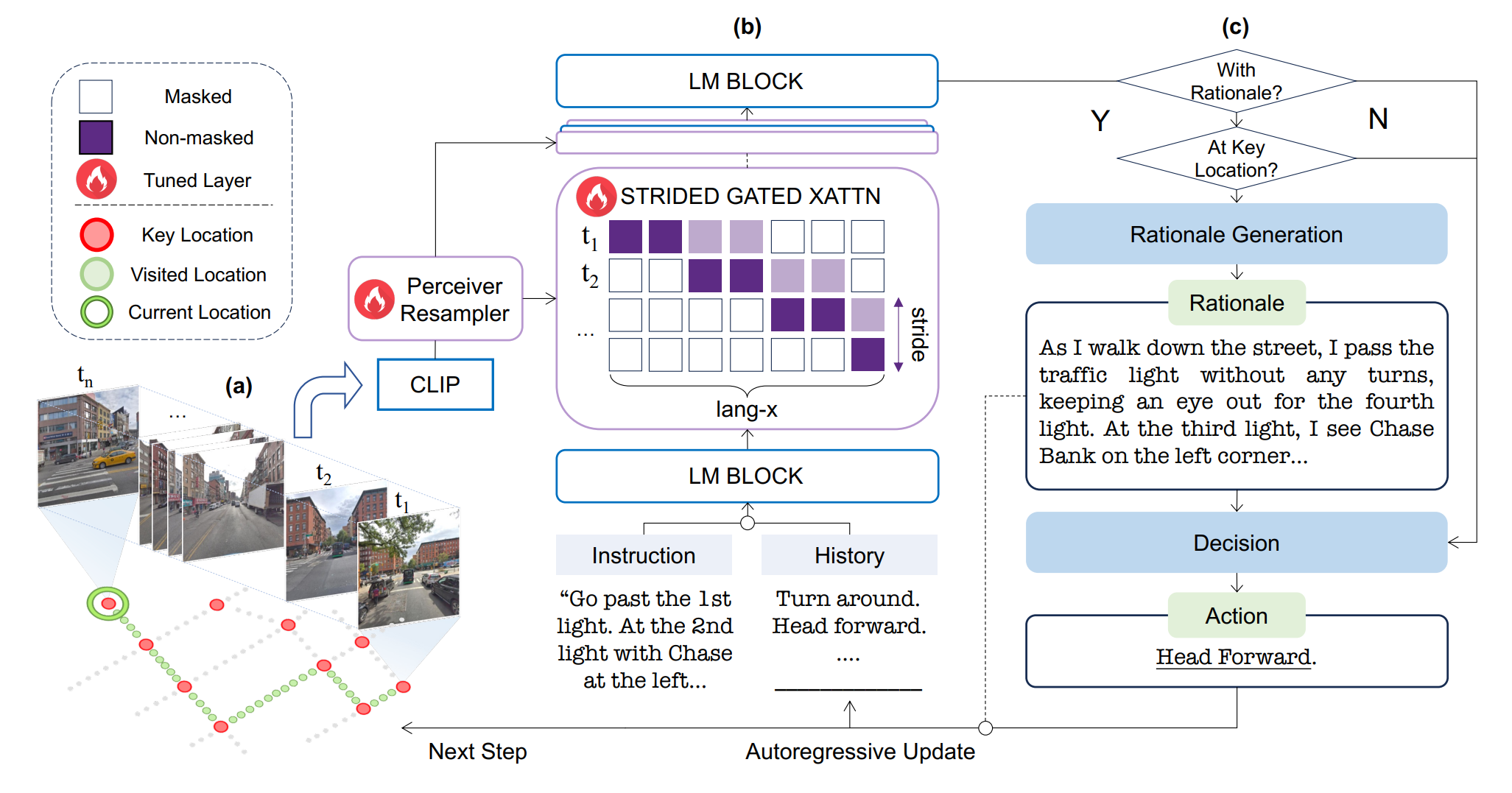
Flame: Learning to Navigate with Multimodal LLM in Urban Environments
Yunzhe Xu, Yiyuan Pan, Zhe Liu, Hesheng Wang
Introduce a multimodal-LLM–driven urban navigation framework that unifies perceptual grounding and high-level reasoning for decisioning in complex city environments.
ArXiv Preprint 2025
Dream to Recall: Imagination-Guided Experience Retrieval for Memory-Persistent Vision-and-Language Navigation
Yunzhe Xu, Yiyuan Pan, Zhe Liu
Propose an imagination-guided retrieval mechanism that persistently aligns episodic memory with future goals, enabling VLN agents to perform more reliable long-horizon navigation.
ICLR 2026
⭐ 1.2k Stars
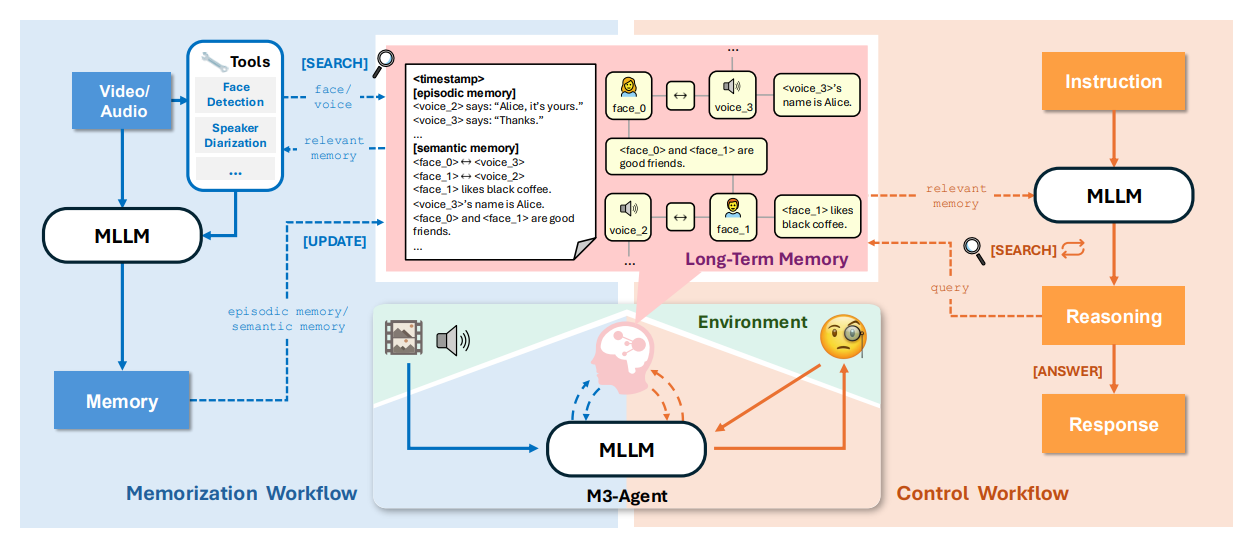
Seeing, Listening, Remembering, and Reasoning: A Multimodal Agent with Long-Term Memory
Lin Long*, Yichen He*, Wentao Ye, Yiyuan Pan, Yuan Lin, Hang Li, Junbo Zhao, Wei Li
Present a long-horizon multimodal agent that unifies perception, memory, and reasoning into a scalable architecture capable of streaming decision-making over extended context.